Howdy! I’m Blake, and I’m a software engineer at Nuro.ai.
Experience
I’ve worked on software and hardware design at several robotics companies:
Carnegie Robotics (September - December 2020, Remote)
I had two projects as a software engineer intern. I built, from scratch, an extrinsic camera calibration tool using Ceres bundle adjustment in C++. I also implemented a new localization algorithm, along with a set of evaluation tests, using OpenCV, for a structure from motion pipeline on a mobile robot.
Tusimple (May - August 2020, Tucson, AZ)
I improved Tusimple’s sensor evaluation process by automating the point cloud segmentation of calibration targets, using a custom RANSAC algorithm in Python. I also designed thermal, electrical, and vibration tests for five different sensing modalities. Finally, I performed root-cause analysis of IMU resonant frequency response on an autonomous truck.

Zipline (June - August 2019, Half Moon Bay, CA)
Zipline builds a drone-based medical delivery network for emergency medical supplies in developing countries and the US. I researched and selected sensors to support an onboard aircraft detection and avoidance system, and built a functional hardware prototype with an aircraft-based sensor. I also upgraded aircraft launcher hardware equipment to improve reliability, assembly time, and field operations, and successfully installed the new design at a production facility and wrote a field rework procedure.

DJI (May - August 2018, Palo Alto, CA)
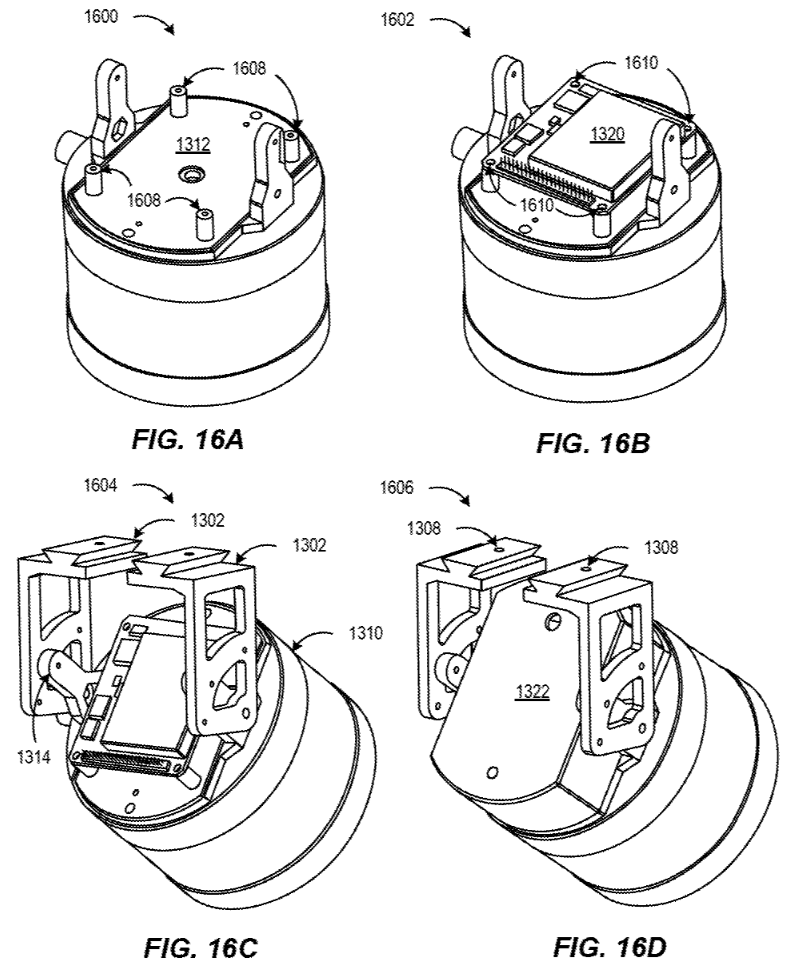
I interned with the Oboard SDK team at DJI, which was developing a drone-based Lidar system. I built the hardware for a fully-functional prototype of the system, to enable the software team to develop algorithms for real-time 3D scanning. I performed vibration isolation and stiffness analyses of my mounting brackets to meet the requirements of the inertial navigation system. The designs I created, shown below, can also be seen in our patent.
Education
I’m a recent M.S. grad of the University of Michigan’s Robotics program.
I graduated from Texas A&M University with a B.S. in Mechanical Engeering, Magna Cum Laude, with Engineering Honors. I worked with the Unmanned Systems Lab on building a drive-by-wire shuttle platform.

Projects
star_align: Align and combine multiple star photos, to create images like this page’s header. This is a re-write of a tool I’d made in python, to get more familiar with CMake and working with libraries like OpenCV.
Tree search controller: A three-part multithreaded project, written in pure C:
- A 2D physics simulator with collision resolution
- A tree search recursive path planner
- A graphics generator for display and debugging
Deepfake Detection: I implemented a frequency domain approach for detecting artificially created images, and trained it to classify fake videos from the Celeb-DF dataset.
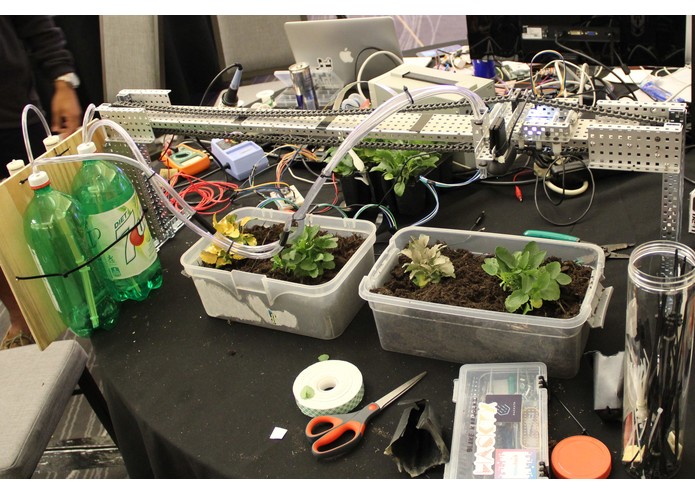
Hackathons: I’ve won prizes at eight hackathons, several of which are listed on my devpost profile. A personal favorite: I wet my plants, a functional, automated plant watering machine built in under 24 hours.
Involvement
In my spare time, I supervise events for Science Olympiad tournaments, a team-based science competition for middle & high school students.
I also helped run TAMUhack, Texas A&M’s annual student hackathon. I set up hardware (arduinos, soldering stations, 3D printers) for the event and built trophies & banners.
Contact
Feel free to reach out! You can reach me at myfirstname.mylastname at gmail dot com.